
Conrad/Reely/GV P190 Quadcopter Brushless Conversion
So what’s one to do with a 3D printer and confined at home?
Well, convert an old nitro RC car to run on a quadcopter motor made for 11-or-so inch props.
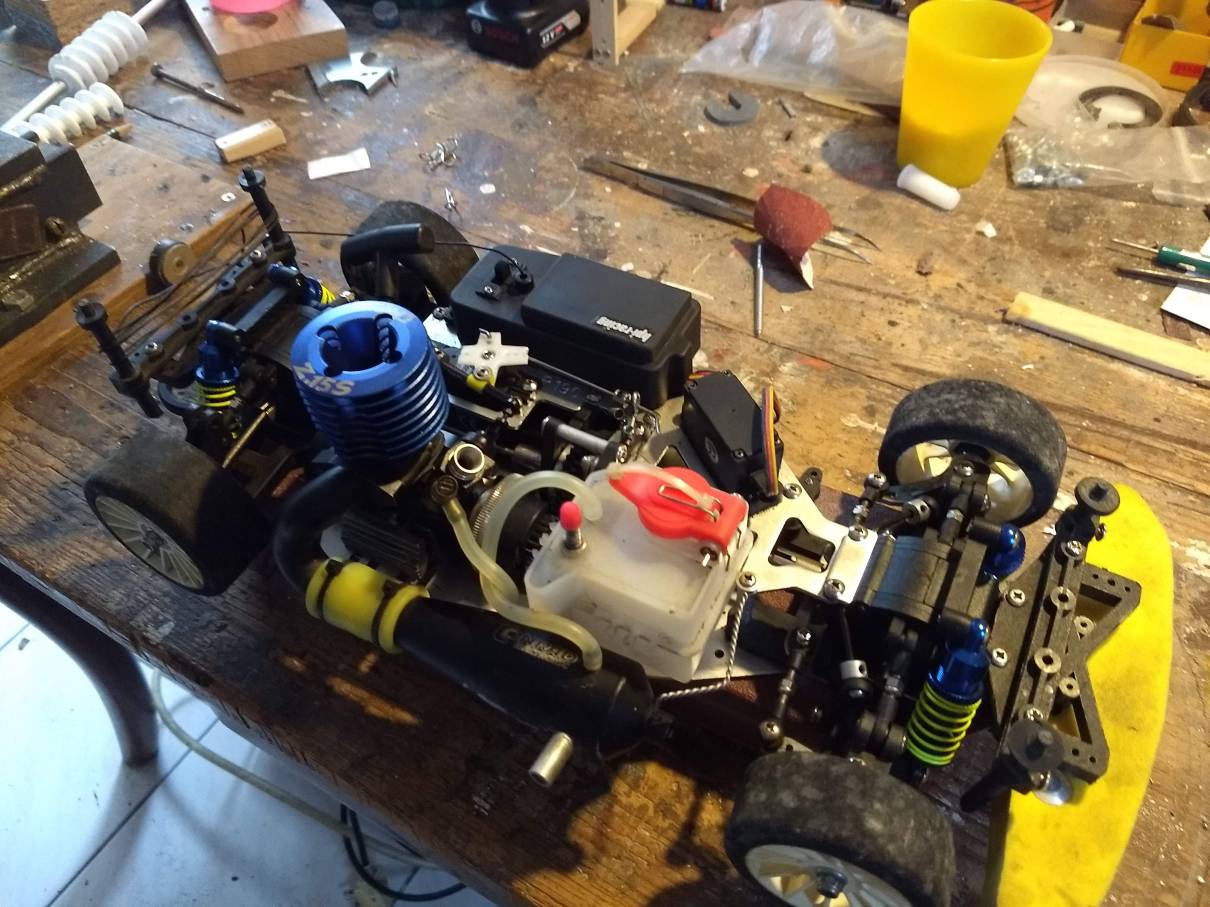
The original RC car:
Electric motor:
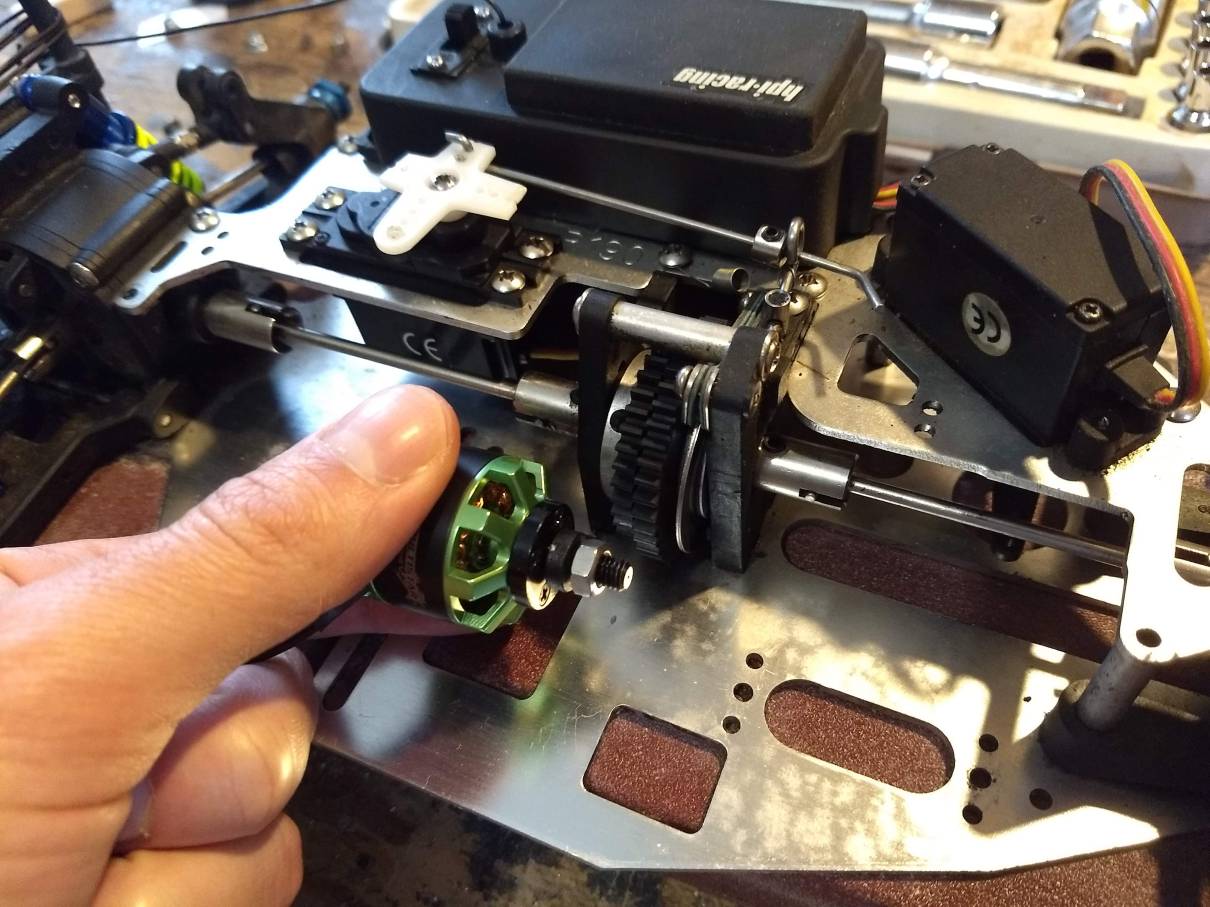
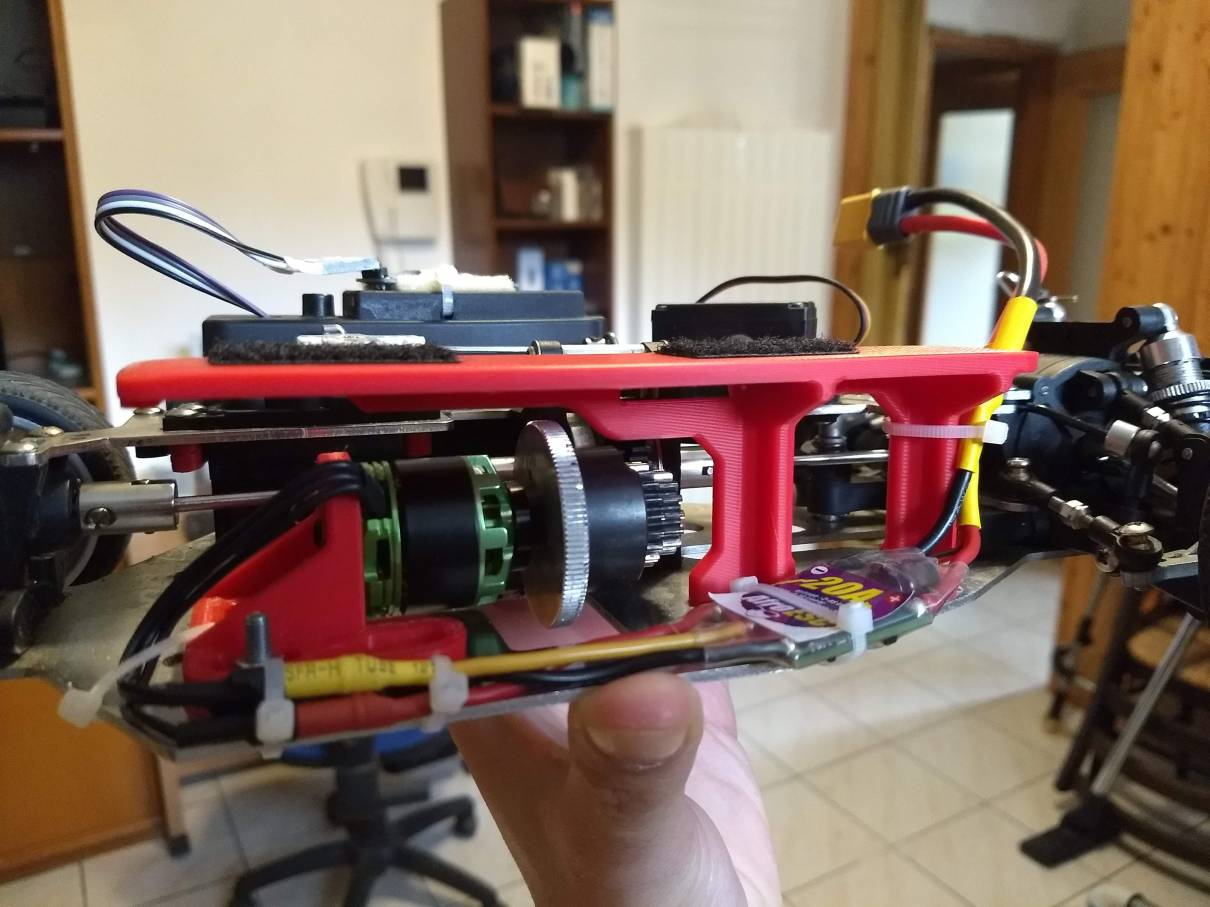
Since I’m using an ESC more suited for airplanes/quadcopters (and possibly also due to the type of motor used) it cannot move reliably at too low speeds, so for now I’ve decided to keep the centrifugal clutch.
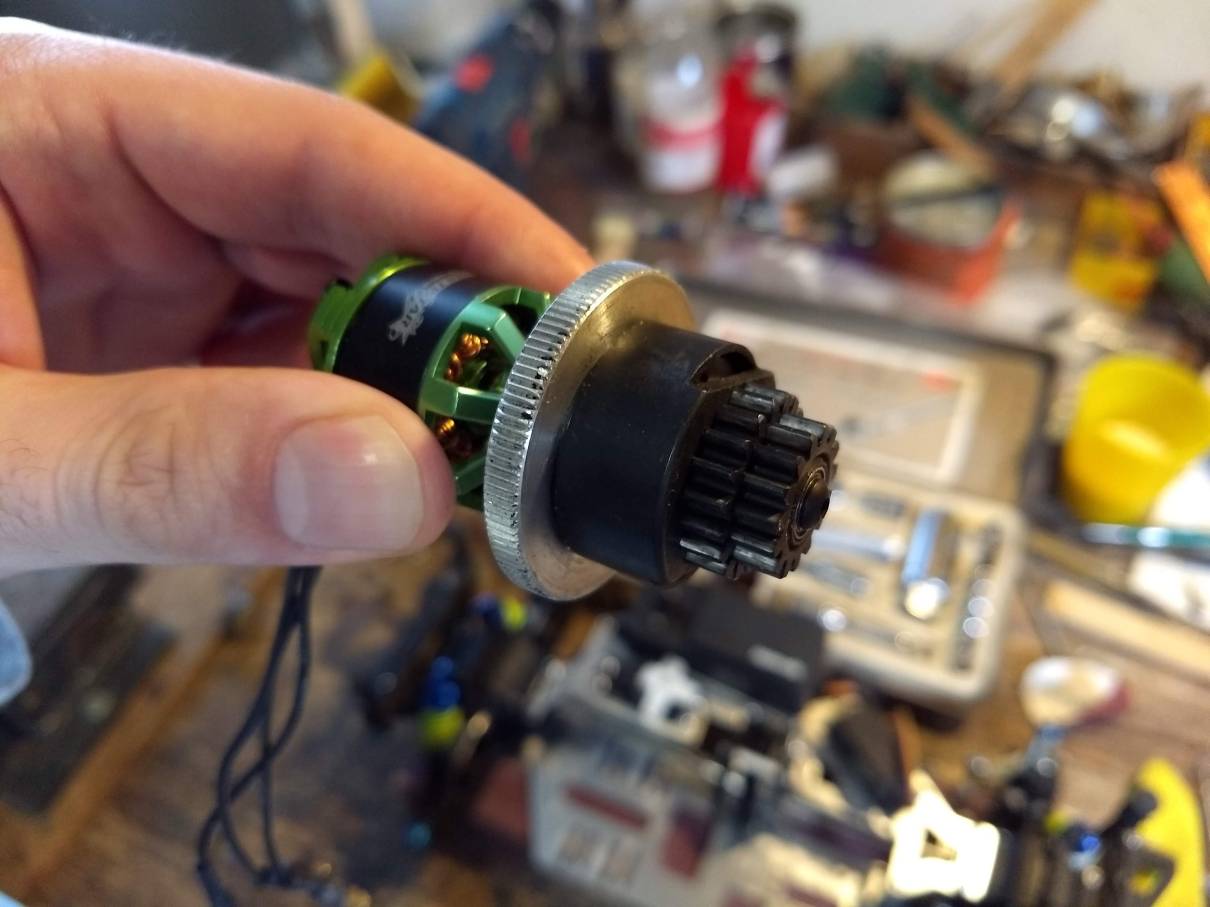
Which, since both the nitro engine and the brushless motor have an M6-threaded output shaft, fits perefectly and is a convenient way to mount the output gear anyway:
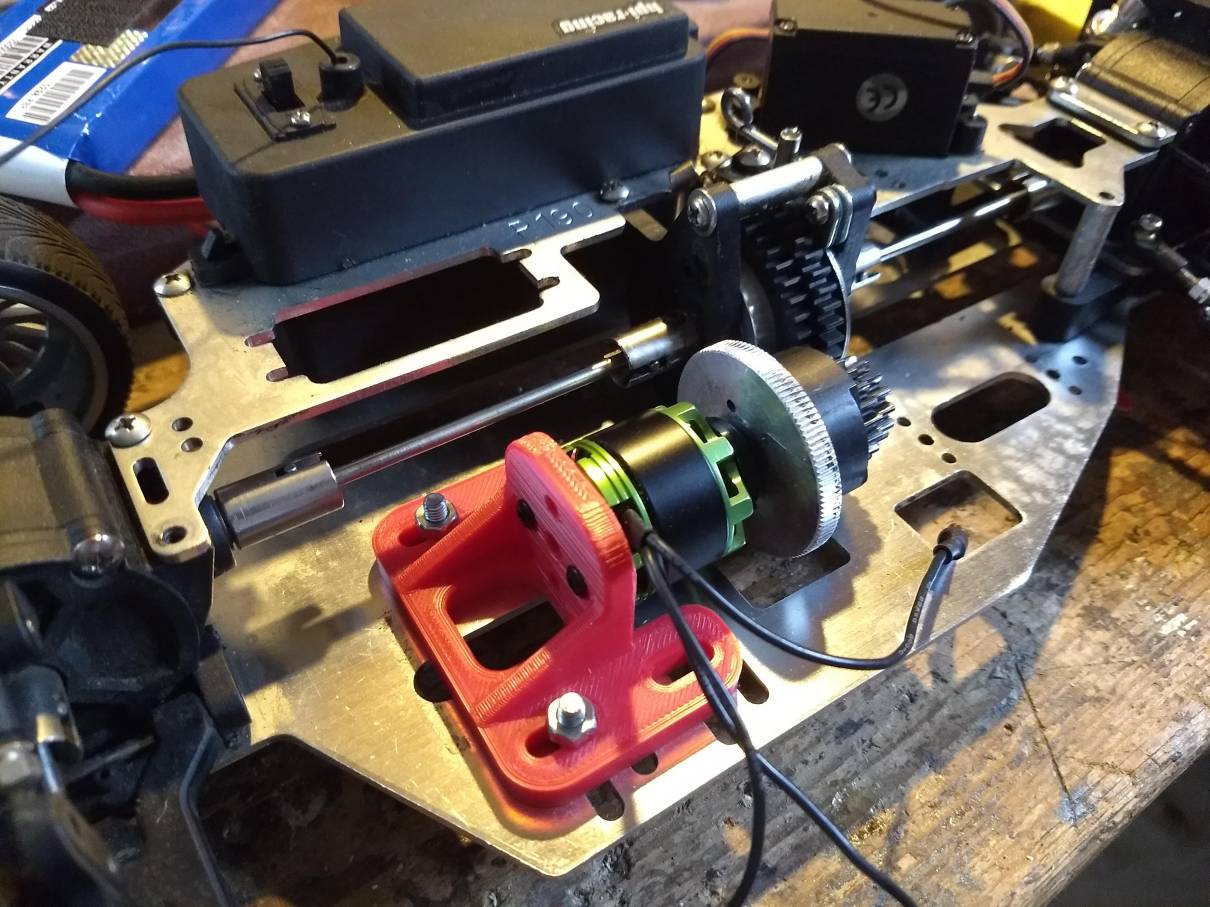
So a motor support was manufactured via standard 3D printing:
After this, a manually-controlled test run could be performed:
Similarly, the first centimeters under its own power: Since nitro-engine powered cars normally have one servo-motor that both operates the brake when moving in one direction and opens the engine throttle when moving in the other, it wasn’t enough to just plug the ESC in the receiver. Additionally, I didn’t want to dedicate a controller just for this project, so in the end by looking what I had lying around I decided to go with an Arduino which receives its commands via Bluetooth from my Android phone and actuates the steering, brake servo, which was retained, and the ESC.Joystick bluetooth Commander - Google Play
In order to test wether the concept was viable at all an Arduino Uno, a breadboard and a lot of tape did come in handy:
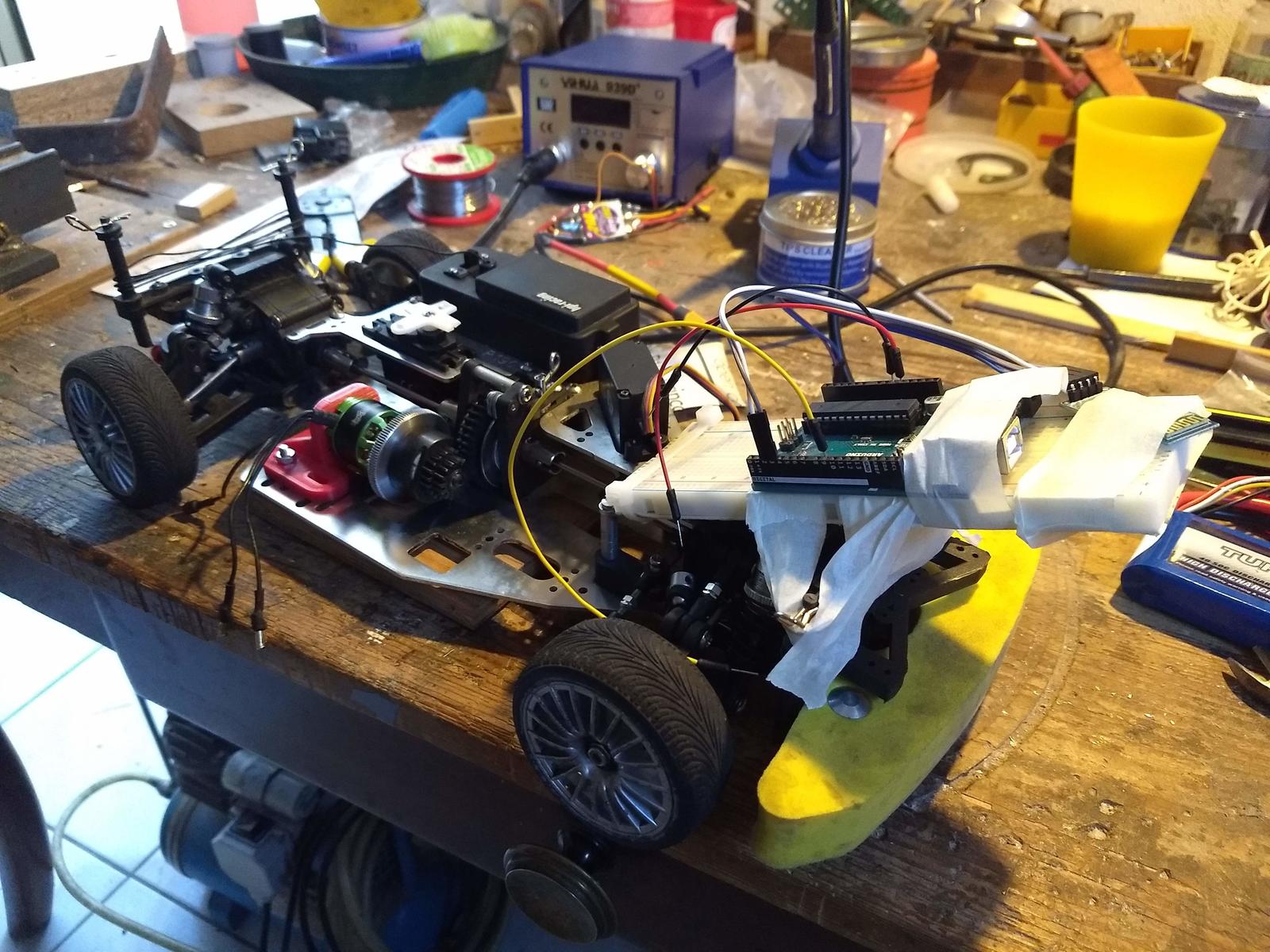
This even mostly worked:
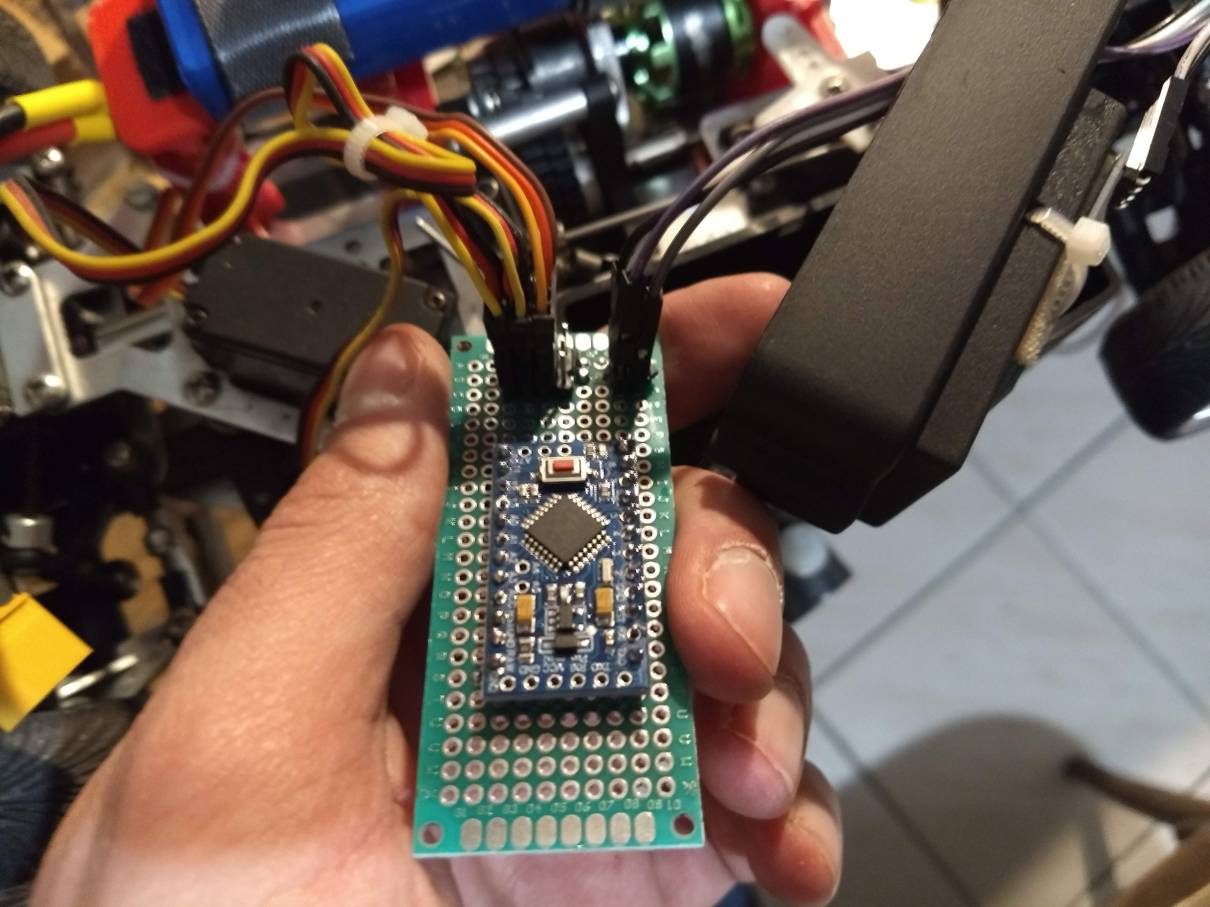
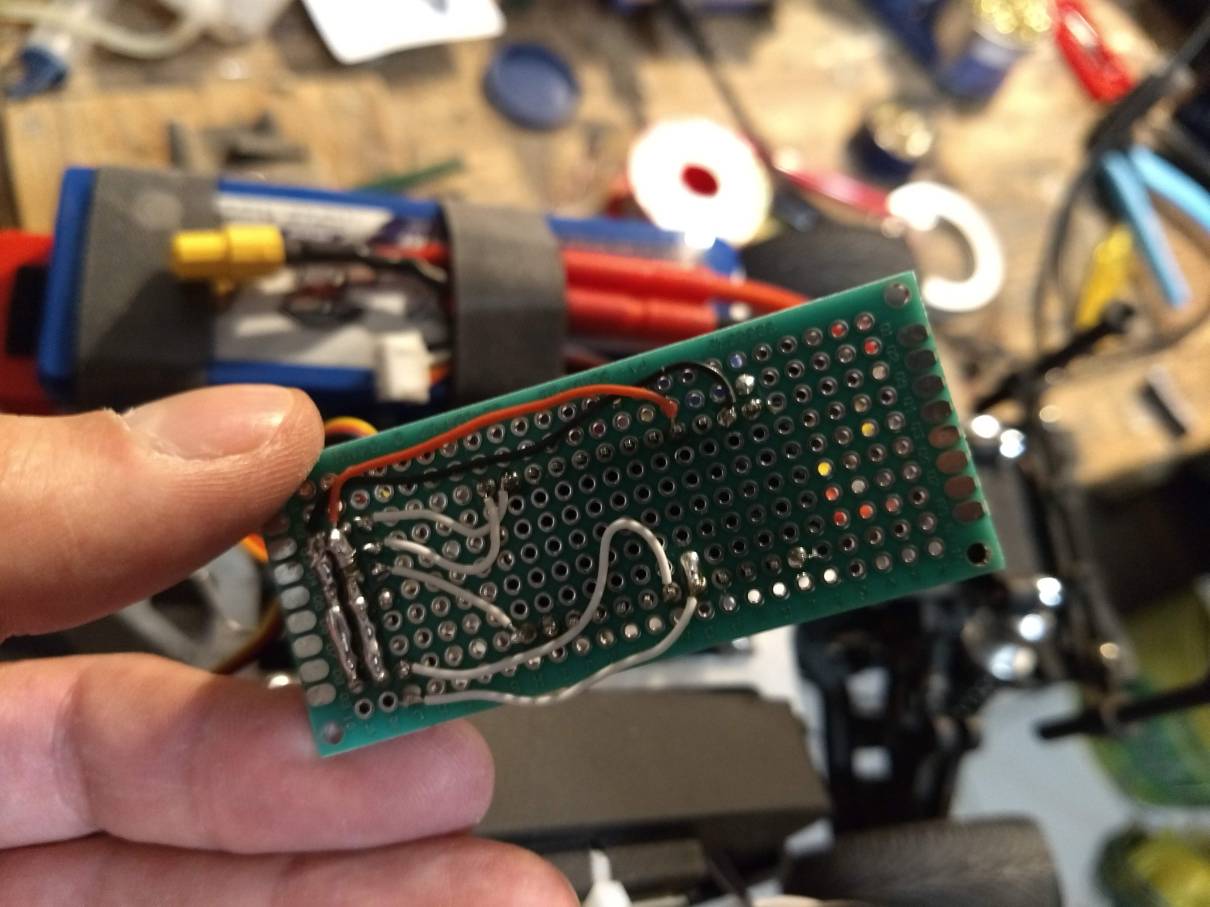
The next day a more proper implementation of the control electronics was prepared with an Arduino Pro Mini and a small perforated board, which had the advantage of also fitting in the existing electronics box:
Along this a support for the battery was printed in PLA:
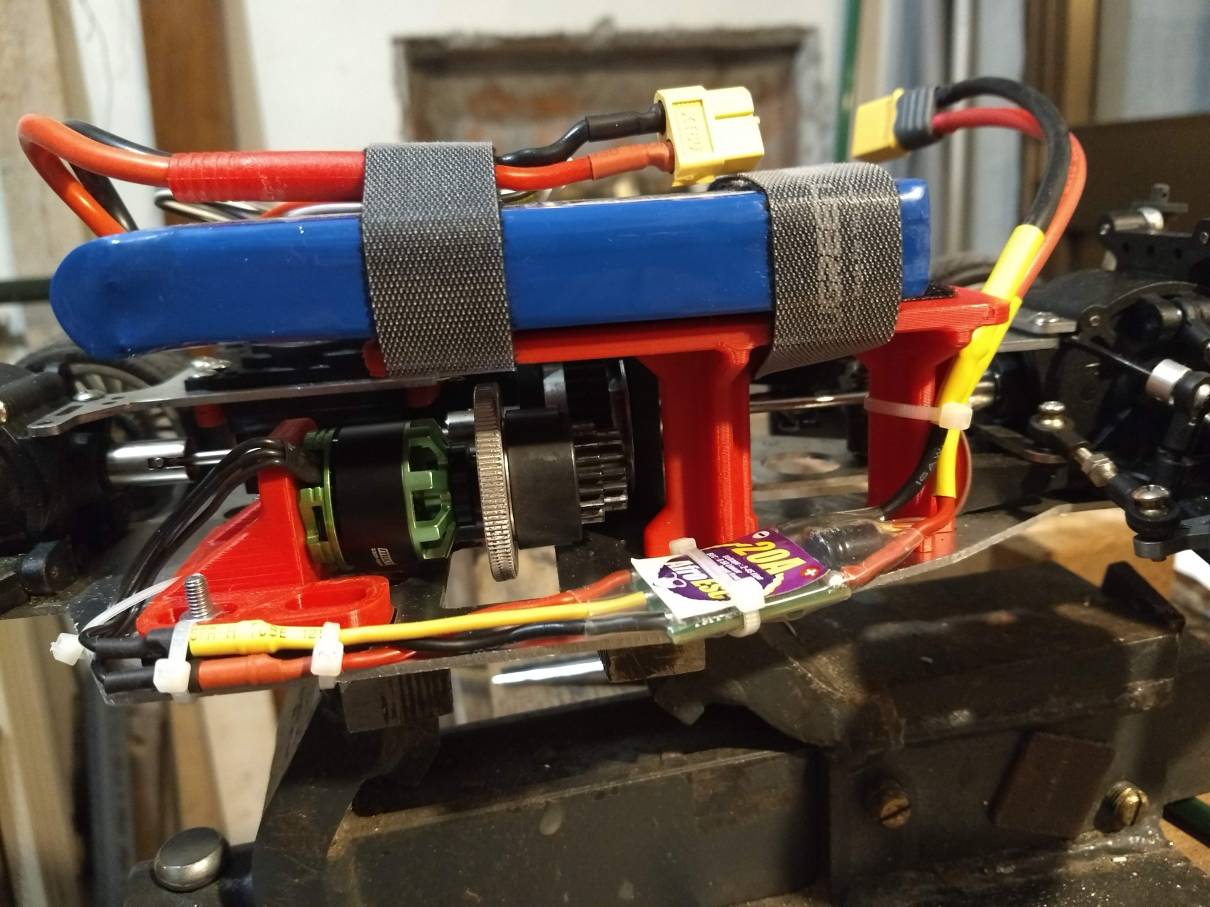
A second version which extended further to the back was needed since otherwise the battery was much too close to the body’s A-pillar:
Finally, a small support for the low-battery beeper was also printed, since there’s no real way to read the battery charge as of yet:

And this was it!